UVW Stage
UVW Stage란
UVW Stage는 XY Theta Stage와 구동 방식이 다른 Stage이다. UVW Stage는 XY Theta Stage와 비교하여 작은 기구물로 제작이 가능하고 보다 정밀한 움직임이 가능하다.
UVW Stage 구동 원리 및 해결 점
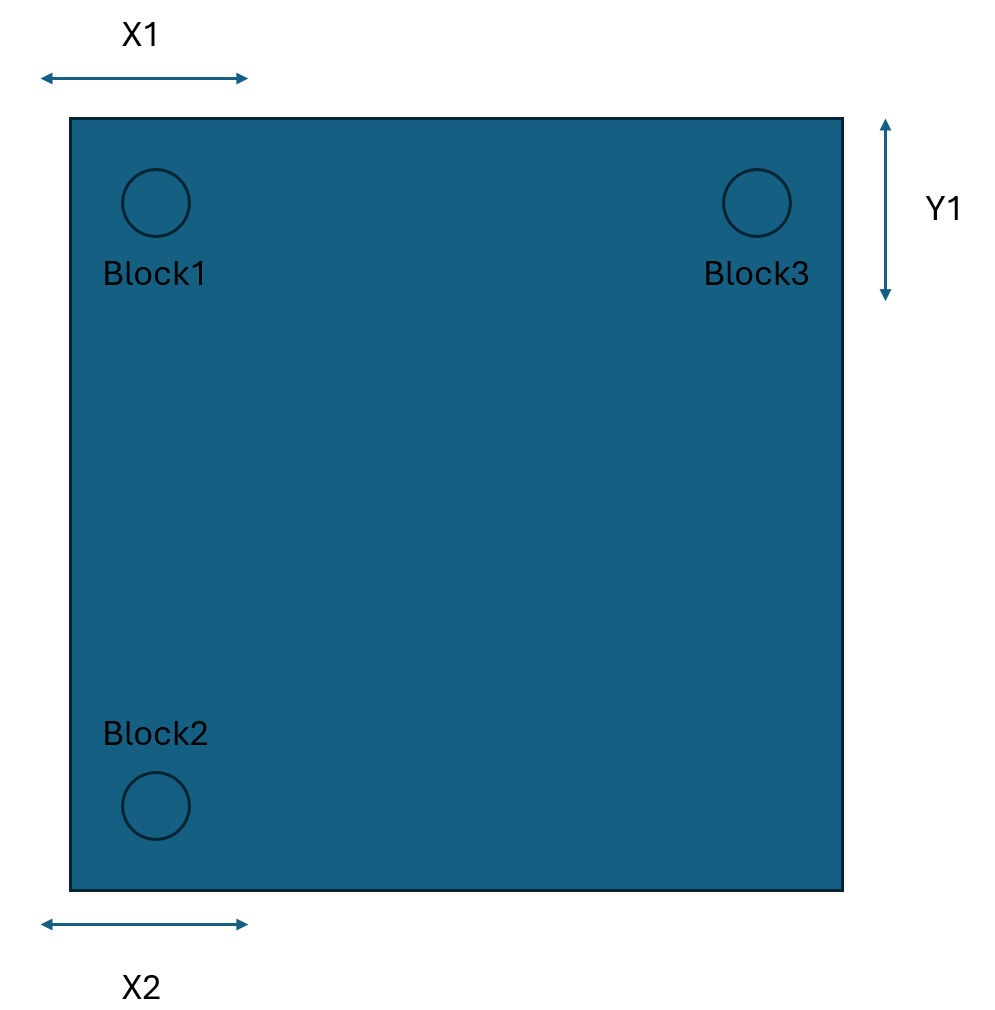
UVW Stage는 Block 이라는 구동 축이 존재하고 각 구동축은 평행 방향 2축, 수직 방향 1축으로 구성된다. (Stage Maker에 따라 축 방향 위치등은 바뀔수 있다.)
### X축 이동 X축은 Block3(Y1축)을 고정하고 Block1과 Block2의 X1,X2축을 변화시키면 X축 이동이 된다.
### Y축 이동 Y축은 Block1과 Block2의 X1,X2축을 고정하고 Block3의 Y1축을 변화시키면 Y축 이동이 된다.
### Theta 이동 Theta 이동은 Block1, Block2, Block3 (X1, X2, Y1)을 유기적으로 이동시켜 Theta가 이동된다.
Stage Maker에서 해당 이동에 대한 관계를 공식으로 제공 한다.
해결점
UVW Stage의 경우 Align을 위한 경우가 많은데, Align의 경우 X,Y, Theta등 변화량을 Stage 이동량으로 변환해야하는 경우가 있다. 이 경우 Stage Maker에 이동 공식을 요청하거나 기구 해석을 통해 식을 도출 해야 할 수 있다.
기본적은 UVW Stage의 본질은 회전 변환 이다. Two-Step Align의 경우 기본 회전 변환으로 해당 UVW Stage 이동을 해결 할 수 있다. ※ One-Step Align은 추가 유도가 필요 할 것으로 생각됨.
UVW Stage 공식
UVW Stage는 Stage Maker에 따라 Block 위치 및 Block 방향이 다를 수 있다. 이번 프로젝트에서 경험 했는데, Maker에서 제공받은 식에는 제어해야하는 Stage에 해당하는 식이 없었다. 이유는 주문제작 Stage였기 때문이었는데 UVW Stage가 회전변환이고, 각 Block의 x,y 값을 구할 수 있게 되어 Stage 제어를 해결하였다.
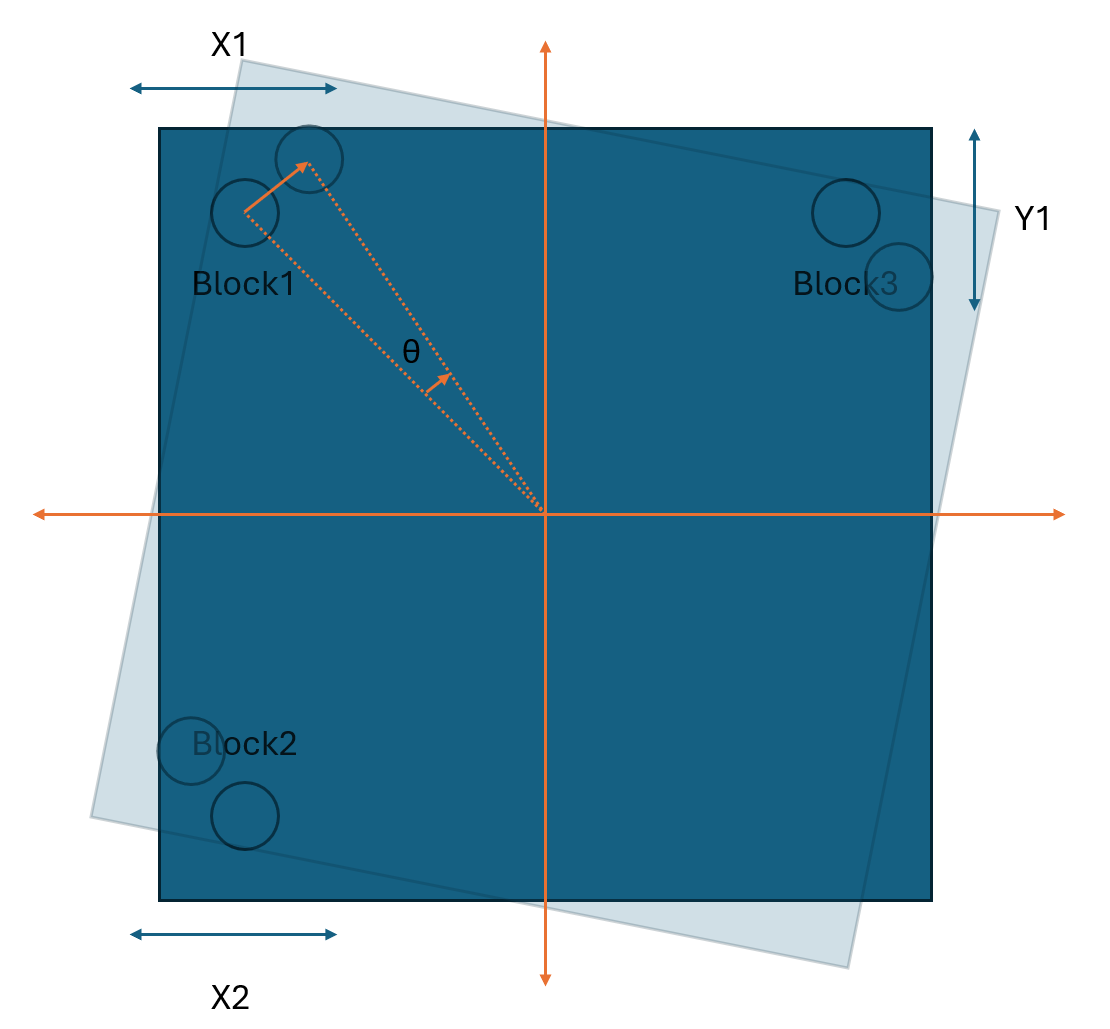
Block 1에 대한 좌표는 \(\textcolor{Black}{ Block1_x = xcos\theta - ysin\theta + \Delta X \\ Block1_y = xsin\theta + ycos\theta + \Delta Y }\)
와 같다.
\(\textcolor{Black}{ \Delta X }\) 는 x 이동량이고, \(\textcolor{Black}{ \Delta Y }\) 는 y 이동량이다.
\(\textcolor{Black}{ x, y }\) 는 Block1의 기구 중심에서의 거리이다. 예로 위의 그림에서 Block1,2,3간의 x,y 거리가 80mm 라고 한다면, Block1의 위치는 (-40, 40), Block2는 (40, 40), Block3는 (-40, -40).
Block1의 좌표를 대입한다면 \(\textcolor{Black}{ Block1_x = (-40)cos\theta - (40)sin\theta + \Delta X \\ Block1_y = (-40)sin\theta + (40)cos\theta + \Delta Y }\) 이다.
그림과 같이 X1축이 모션 축이라고 한다면, \(\textcolor{Black}{ Block1_x }\) 에 대한 식을 사용하여 모션제어를 수행 하면 된다.